Table of Contents
mindmap
WORKs
(Online SLAM)
Lidar SLAM
Lidar-IMU
Lidar-IMU-Image
Visual SLAM
Visual-Car
Visual-IMU
ML Re-Localization
(OffLine Mapping)
Visual Based
Point Based SFM
Global Averaging
Line Based SFM
Cuda Based Image MVS
Map Summarization
Lidar Based
TSDF Pointcloud
Mesh : Delaunay Ray Tracing
Multi-Map Fusion
Deep Learning
NERF
Gaussian Splatting
(Other Image Processing)
Multiplane Images
Monocular Depth
Infra-Red
Panorama
(MR)
World Generation
MR 6DOF in Vehicle
Vertigo Reduction
RunTime Rendering
OpenXR Native
(Embedded System)
Arduino
ESP IDF
OBD canbus
DeepMirror
website : MirrorSpace - City scale spatial mapping and localization.

My work 2024
A. Low Cost INS
Use low quality GPS & IMU only. Achieve state-of-art INS performance.
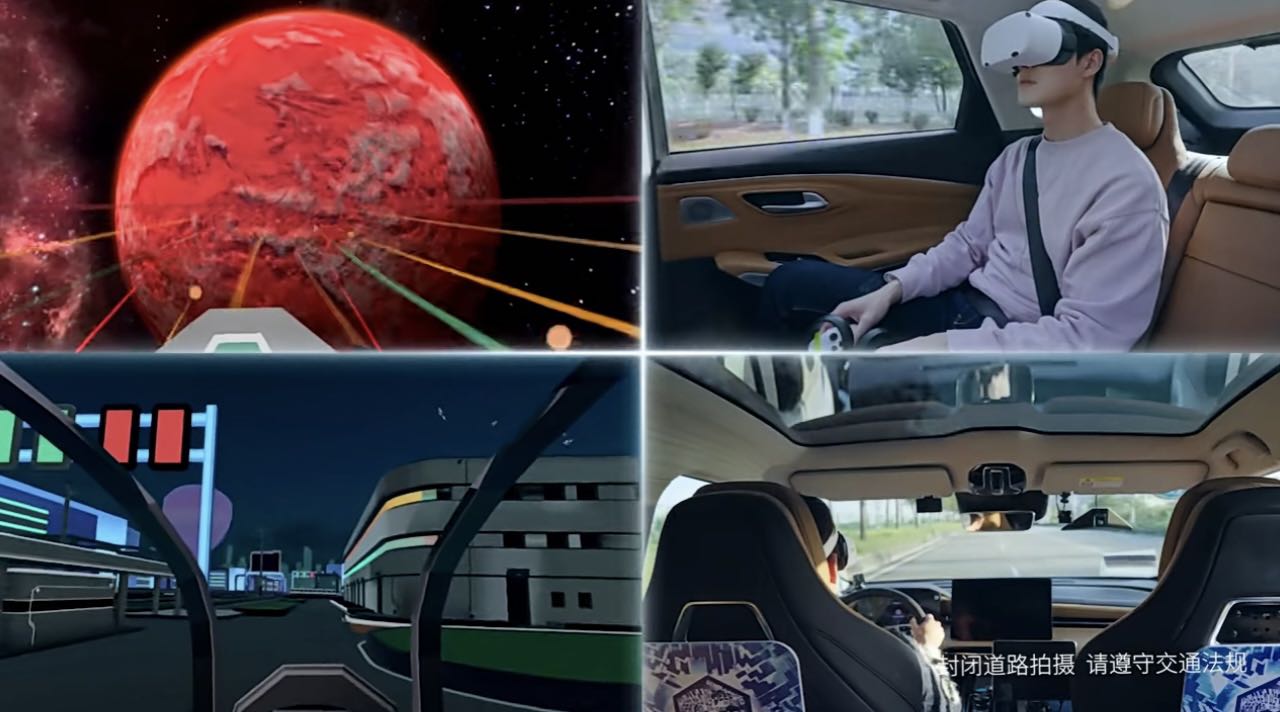
B. Automatic World Generation
Generate random world, based on earth topology and OSM road map. Video.
- Terrain generation (random while fits earth topology).
- Shaders : shadow & light & fog & water.
- MR rendering.
C. MR in Vehicle 6DOF
Enable MR device to have 6DOF tracking in any vehicle.
- Well designed fusion algorithm to give a comfort experience.
- Output poses both in car reference frame & world reference frame.
- Realtime on board absolute localization (w.r.t. car) using deeplearning.
D. Video Streaming
Stream outside Panorama view to MR.
- Camera hardware connection, image stitch, video encoder.
- Video Streaming using FFMPEG.
- MR video decoder, panorama rendering.
My work 2023
A. Outside-in Infrared Localization Modules
IR light detection, and fusion with imu measurement by kalman filter. Run with OpenXR & Monado.
- VR hand 6dof tracking.
- AR/VR camera tracking in difficult scenes (e.g. inside moving cars).
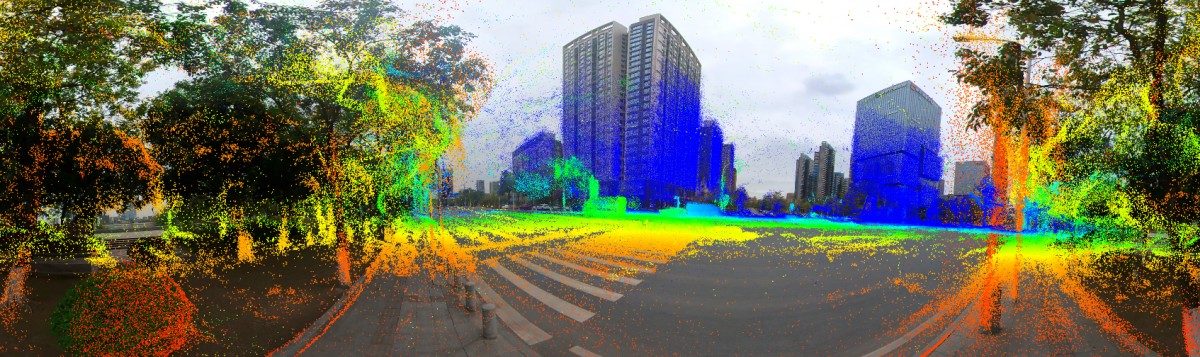
B. Panorama Video Visual Mapping
Panorama video (insta360 & go-pro) is the only input.
- pure visual sfm mapping pipeline based on Global Averaging method (shonan rotation average & 1dsfm translation average).
- usage of IMU:
- extrinsics & timestamp calibration for camera-imu.
- scale and gravity recovery of the visual map.
- MVS image depth recovery (both traditional cv method and Deep Learning method).
C. Line Mapping & Localization
see Line Mapping Page.
- Line mapping for traffic lane mapping.
- Use line feature for visual based localization : my branch of LIMAP.
D. Deep Learning
- Use Dense Match with relative pose (Global averaging) for localization and visual mapping.
- Use Nerf with our data session.
- Use Multiplane Images for render live 3d videos (as shown in Apple Vision Pro), test video in PICO.
- Use ACE for mapping, and check its descriptor quality with match test.
My work 2022
working on slam/vlp system.
A. INS fusion
working on meta-verse for cars.
- car localization - ins system : Based on iterative extended error state kalman filter. imu (motion model) + gps + chassis + visual localization.
- vr in-car localization - work with guangqi for AR-HUD & VR.
- 广汽ADiGO SPACE升级沉浸式智能座舱体验 2022.
- patent: 一种车载XR设备定位方法、装置、设备及存储介质 CN115690194B.
- DeepMirror在宝马汽车元宇宙比赛中荣获第一名 2023. First place in the “Vehicle Readiness” category was secured by Chinese start-up DeepMirror Inc.
Details
B. VLIO algorithm
lidar-imu-image slam, based on image direct method with photometric refinement (following last year’s work). patent: 基于激光视觉融合的建图方法及系统 CN115797490B.
Details
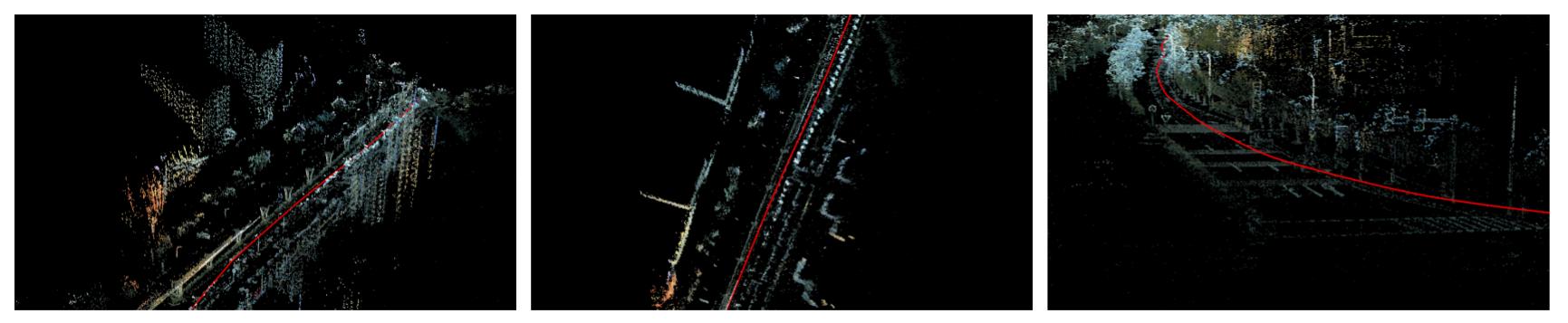
C. pointcloud & mesh generation
Designed for multi-session lifelong map, handle environement change.
- Color Point Cloud : TSDF generation (using cuda c++).
- Mesh Generation : Delaunay + ray casting + min-cut + post-processing.

Details
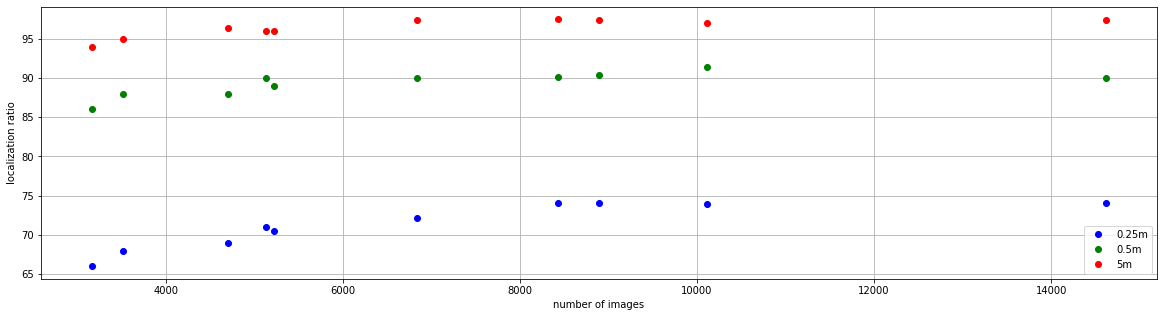
D. visual map summarization
For simplification of visual localization map.
- Vision bundle adjustment problem graph analysis. (using SNAP)
- Solve ILP (integral linear programming) problem based on paper
- Keep 10% the points, with neglectable drop in localization benchmark accuracy.
Details
My work 2020 - 2021
A. lidar-imu-gps slam algorithm
- 2 versions (all written by our team) :
- pose graph optimization (reference LIO-SAM)
- iterative extended error state kalman filter (reference FAST-LIO2).
- Many additional constrains, robust backend optimzation, more robust imu initialization.
- Loop closure based on global descriptor (ISC).
- Sensor set: imu, rs-lidar-16, gps, cpu only, 20 FPS on nvidia-nx.
Details
- Using Ceres instead of GTSAM : write all the cost functions (without auto-diff, including imu preintegration factors).
- accelerate frame-to-map ICP, using a new Gaussian Newton algorithm.
- state initialization based on imu preintegration (bsaed on VINS, but remake to be better).
- accelerate lidar undistortion and feature extraction (based on multi-threading, and refine memory usage).
- tested in over 200h of our data.
B. camera-chassis-gps slam algorithm
Single camera semi-dense direct method (reference DSO) to mapping fastly the whole city road map.
- tightly coupled with chassis input.
- cpu + arm refinement, 50 FPS on nvidia-nx.
- designed pipeline, mapped full Nansha.GuangZhou Area.
Details
C. multi-session fusion
Robust Distributed Pose Graph Optimization. (robust to outliers, and multi-threading process with graph cut)
- Loop finding : gicp & global registration (based on FPFH + TEASER) & ISC (intensity scene context).
- Database structre based on s2 blocks.
- Mapped full Nansha.GuangZhou Area (until 2022).

Details
D. car routing
- based on OSM lane map.
- lane level map & way point level map.